Robotic Quadcopter Dock
Quadcopter catching Kuka arm for ME 225A
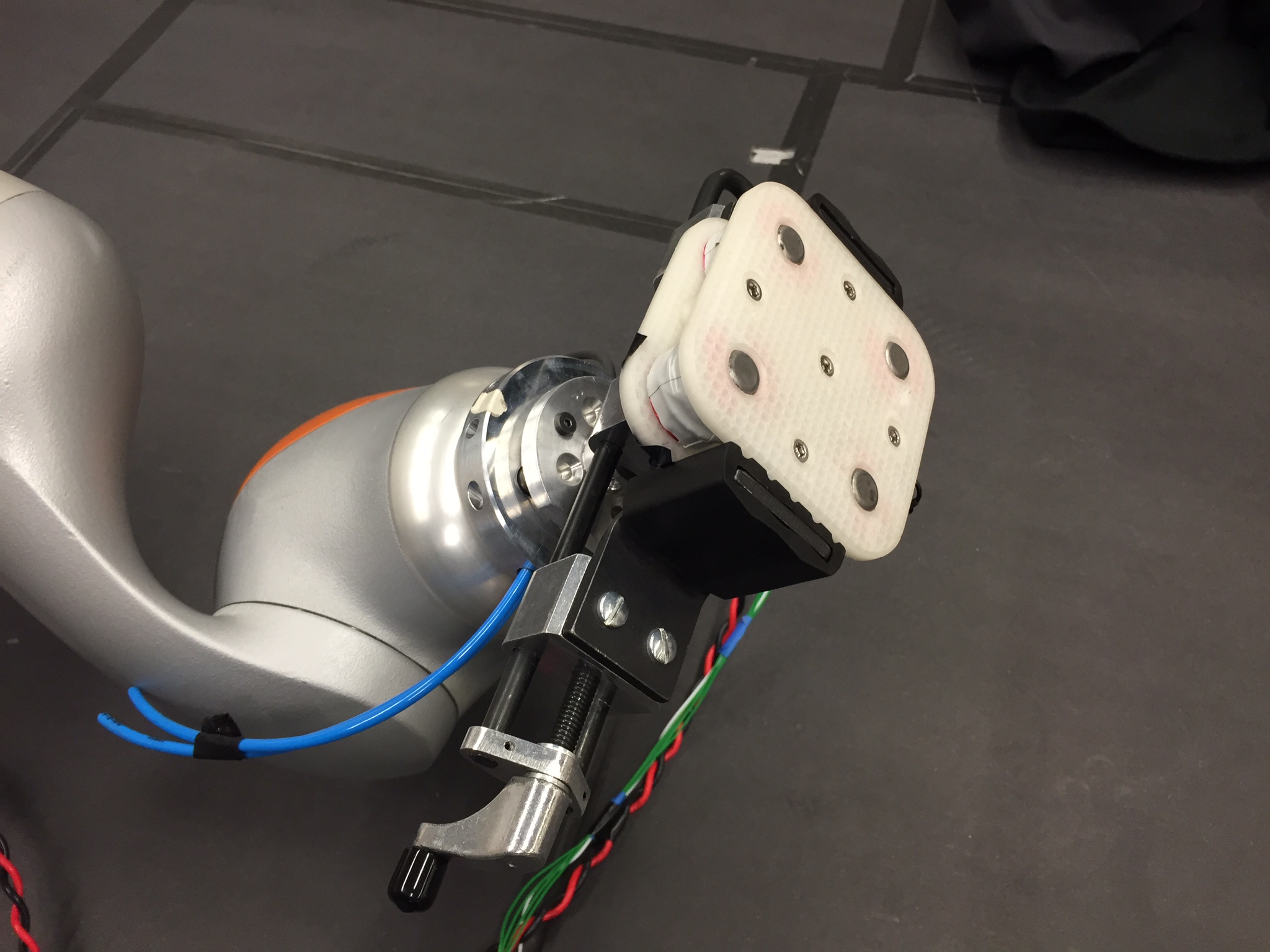
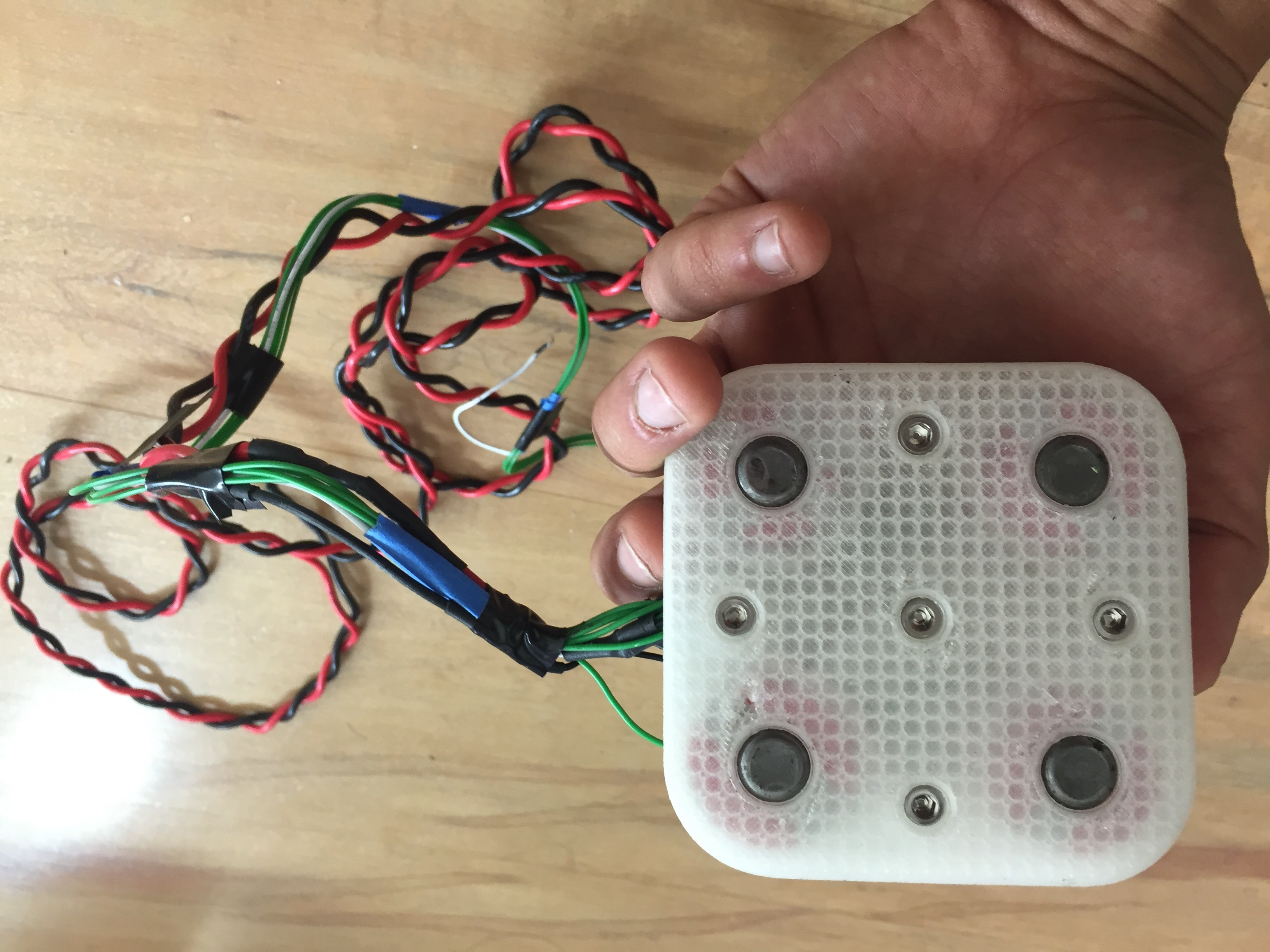
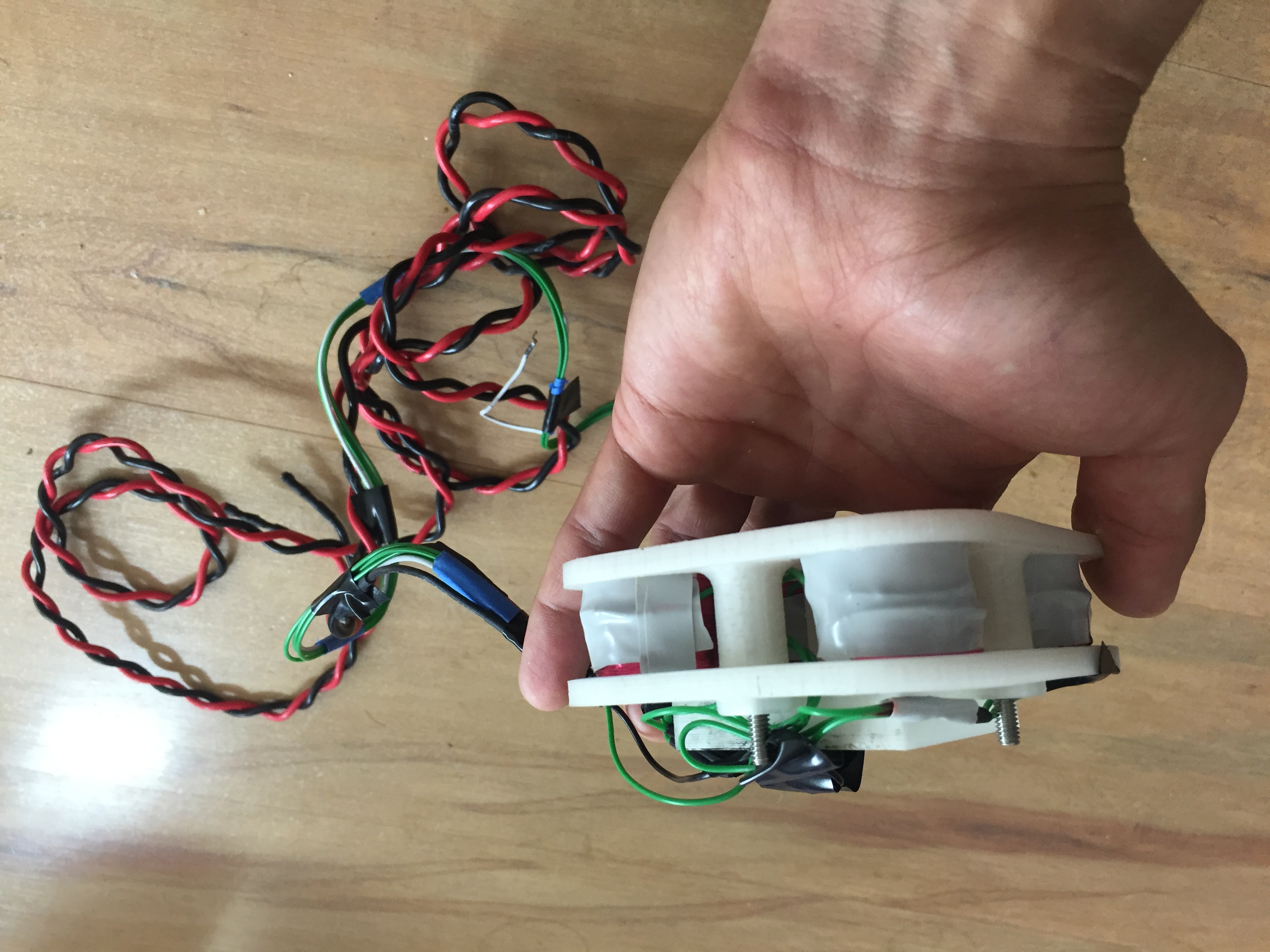
For the advanced robotic control class at Stanford Vivek Nair, Jack Zhu, and I decided to use the Kuka arm at our disposal to create a quadcopter dock. By attaching an electromagnet to the arm's end effector we were able to create a platform which a quadcopter could both take off from and land on to. We acomplished this by using a motion capture system to track the remote controlled quadcopter in 3D space and when the drone flew into the robot's workspace the arm would position it's end effector a few inches below the center of the quadcopter. After flying the drone into this position we cut power to the quadcopter, turned on the electromagnetic dock, and the robot would catch the drone. This was a very interesting robot control project and we could see this type of system being deployed on something such as a small military sea vessle which would be tricky to land an aircraft onto. Completed Fall of 2014.